


Động cơ Step là gì ?
14:32 - 06/07/2024
Các dịch vụ của ECN:
- Sửa chữa máy CNC: Chuyên sửa chữa các loại máy CNC của các thương hiệu nổi tiếng như Fanuc, Mitsubishi, Siemens, Okuma,... với các lỗi từ đơn giản đến phức tạp.
- <li style="te
1 Nếu bạn đang có nhu cầu sửa chữa máy CNC,thì không thể bỏ qua Công Ty TNHH Điện Tử Công Nghiệp ECN ,nơi sửa chữa CNC uy tín và chất lượng nhất Miền Bắc.
Công Ty TNHH Điện Tử Công Nghiệp ECN được thành lập vào đầu năm 2016 bởi ông Đỗ Văn Mạnh,một k ỹ sư tự động hóa hàng đầu trong lĩnh vực biến tần và điều khiển tự động .Từ những bước khởi đầu khi chỉ hoạt động với một số nhân viên nhỏ,giờ đây ECN đã trở thành công ty phát triển và là công ty top đầu trong lĩnh vực công nghiệp CNC tại Miền Bắc.
ECN là đơn vị uy tín chuyên sửa chữa phần cứng máy CNC .Với độ ngũ kỹ thuật viên giàu kinh nghiệm ,ECN đã thực hiện nhiều dự án sửa chữa thành công trên các loại máy CNC từ các hãng nổi tiếng như Fanuc,Mitsubishi,Mazak,Yasnac,Siemens,Fagor,Hitachi Seiki,…và nhiều hãng khác .
 Công Ty TNHH Điện Tử Công Nghiệp ECN –Kinh nghiệm 10+ Năm sửa chữa máy CNC tại Việt Nam-Sửa được tất cả mọI lỗi ở máy CNC –Sửa nhanh,hiệu quả-Bảo hành lâu dài-Giá cả hợp lý rẻ hơn thị trường 25%-Đội ngũ kỹ thuật hùng hậu –Hỗ trợ kỹ thuật 24/7-Trang thiết bị sửa chữa tân tiến hiện đại nhất Việt Nam.
Công Ty TNHH Điện Tử Công Nghiệp ECN –Kinh nghiệm 10+ Năm sửa chữa máy CNC tại Việt Nam-Sửa được tất cả mọI lỗi ở máy CNC –Sửa nhanh,hiệu quả-Bảo hành lâu dài-Giá cả hợp lý rẻ hơn thị trường 25%-Đội ngũ kỹ thuật hùng hậu –Hỗ trợ kỹ thuật 24/7-Trang thiết bị sửa chữa tân tiến hiện đại nhất Việt Nam.
 Đỗ Văn Mạnh:Người sáng lập ra Công Ty TNHH Điện Tử Công Nghiệp ECN.
Đỗ Văn Mạnh:Người sáng lập ra Công Ty TNHH Điện Tử Công Nghiệp ECN.

1.1 Trong bài viết này chúng tôi sẽ nói về động cơ step.Vậy động cơ step là gì ?
Bài viết này đã được xem xét bởi dự án biên soạn và ứng dụng bách khoa toàn thư khoa học “Phổ biến khao học ở Trung Quốc”.
Động cơ bước là động cơ chuyển đổi tín hiệu xung điện thành chuyển vị góc hoặc chuyển vị tuyến tính tương ứng.Mỗi khi tín hiệu xung được đưa vào ,roto sẽ quay một góc hoặc di chuyển về phía trước một bước .Độ dịch chuyển góc hoặc độ dịch chuyển tuyến tính đầu ra tỉ lệ thuận với số xung đầu vào và tốc độ quay tie lệ thuận với tần số xung.Vì vậy ,động cơ bước còn được gọi là động cơ xung.(1 loại động cơ cảm ứng.Theo nguyên lý điện tử ,điện năng được chuyển hóa thành cơ năng).

MỤC LỤC
- 1 Nếu bạn đang có nhu cầu sửa chữa máy CNC,thì không thể bỏ qua Công Ty TNHH Điện Tử Công Nghiệp ECN ,nơi sửa chữa CNC uy tín và chất lượng nhất Miền Bắc. 1
- 1.1 Trong bài viết này chúng tôi sẽ nói về động cơ step.Vậy động cơ step là gì ?. 3
- 1.2 Giới thiệu. 3
1.2.1 Tổng quan về công nghệ điều khiển động cơ bước và phát triển. 4
1.4.1 Công nghệ điều khiển quá trình tăng giảm tốc động cơ bước. 6
1.4.2 Phân khu điều khiển động cơ bước. 7
1.5.4 Ưng dụng điều khiển thông minh. 10
1.5.6 Điều khiển mạng lưới thần kinh. 11
- 1.6 Dưới đây là quảng cáo về dịch vụ sửa chữa máy CNC của Công ty ECN: 11
- Để được hỗ trợ và báo giá nhanh nhất ,Cam kết dịch vụ sửa chữa tại ECN. 12
1.2 Giới thiệu
- Động cơ bước hay còn gọi là động cơ xung,hoạt động dựa trên nguyên lý cơ bản nhất của nam châm điện.Nguyên ý hoạt động của nó dựa trên sự thay đổi độ dẫn từ của khe hở không khí để tạo ra mô-men xoắn điện từu.Mô hình ban đầu có nguồn gốc từ năm 1830 đến 1860.Những nỗ lực nhằm mục đích kiểm soát bắt đầu vào khoảng năm 1870 và đưuọc áp dụng vào cơ chế vận chuyển điện cực của đèn hồ quang Hydro.Đây được coi là động cơ bước nguyên bản .Năm 1923,James Wỉ French đã phát minh ra máy biến từ trở bap ha (Variable Reluctance),tiền thân của động cơ bước.Vào đầu thế kỷ 20,động cơ bước được sử dụng rộng rãi trong các tổng đài điện thoại tự động .Khi các cường quốc tư bản phương Tây tranh giành thuộc địa ,động cơ bước được sử dụng rộng rãi trong các hệ thống độc lập như tàu thủy và máy bay thiếu nguồn điện xoay chiều.Việc phát minh ra bóng bán dẫn vào cuối năm 1950 dần dần được áp dụng vào động cơ bước,giúp việc điều khiển kỹ thuậy số trở nên dễ dàng hơn.Sau những năm 1980,do sự xuất hiện của các loại vi tính giá rẻ có nhiều chức năng nên các phương pháp điều khiển động cơ bước trở nên linh hoạt va đa dạng hơn.
- Sự khác biệt lớn nhất giữa động cơ bước và các động cơ điều khiển khác là nó nhận điều khiển kỹ thuật số(tín hiệu hiệu xung điện)và chuyển đổi chúng thành chuyển vị góc hoặc chuyển vị tuyên tính tương ứng.Bản thân nó là một bộ chuyển động hoàn thành việc chuyển đổi chế độ kỹ thuật số.Hơn nữa ,nó có thể sử dụng để điều khiển vị trí vòng hở và có thể đạt được mức tăng vị trí xác định bằng cách nhập tín hiệu xung.So với hệ thống điều khiển DC truyền thống,chi phí của cái gọi là hệ thống điều khiển vị trí gia tăng này giảm đáng kể ,và hầu như không cần điều chỉnh hệ thống .Độ dịch chuyển góc của động cơ bước tỉ lệ thuận với số lượng xung đầu vào và được đồng bộ hóa với các xung theo thời gian .Do đó,miễn là số lượng ,tần số và trình tự pha của cuộn dây động cơ được kiểm soát thì có thể đạt được góc,tốc độ và hướng cần thiết.
- Động cơ bước của Trung Quốc bắt đầu vào những năm 1970 đến giữa năm 1980 là giai đoạn phát triển của các sản phẩm hoàn chỉnh.Cấc loại động cơ mới và động cơ hiệu suất cao liên tục được phát triển .Sự phát triển của vật liệu nam châm vĩnh cửu,công nghệ bán dẫn và công nghệ máy tính đã làm cho động cơ bước được sử dụng rộng rãi trong nhiều lĩnh vực.
1.2.1 Tổng quan về công nghệ điều khiển động cơ bước và phát triển.
- Là một động cơ đặc biệt để điều khiển ,động cơ bước không thể kết nối trực tiếp với nguồn điện DC hoặc AC để hoạt động mà phải sử dụng nguồn điện chuyên dụng (trình điều khiển động cơ bước).Trước sự phát triển của công nghệ vi điện tử ,đặc biệt là công nghệ máy tính,bộ điều khiển (bộ tạo tín hiệu xung)đưuọc thực hiện hoàn toàn bằng phần cứng và hệ thống điều khiển sử dụng các thành phần riêng biệt hoặc mạch tích hợp để tạo thành một vòng điều khiển ,cũng tiêu tốn một lượng lớn linh kiện .Sau khi hoàn thiện,nếu muốn thay đổi sơ đồ điều khiển thì phải thiết kế lại mạch điện.Điều này đồi hỏi phải phát triển các trình điều khiển khác nhau cho các độngc wo khác nhau .Độ khó phát tiển và chi phí phát triển rất cao và việc điều khiển khó khan ,điều này hạn chế việc phát triển động cơ bước.
- Vì động cơ bước là thiết bị chuyển đổi các xung điện thành các chuyển động cơ học rời rạc và có đặc tính kiểm soát dữ liệu tốt nên máy tính đã trở thành nguồn truyền động ý tưởng cho động cơ bước.Với sự phát triển của vi điện tử và công nghệ máy tính ,phần mềm ,phần cứng ,trở thành dòng chính ,tức là xung điều khiển được tạo ra thông qua chương trình để điều khiển mạch phần cứng .Bộ vi điều khiển điều khiển động cơ bước thông qua phần mềm ,khai thác tốt tiềm năng của động cơ .Vì vậy,việc sử dụng máy vi tính đơn chip để điều khiển động cơ đã trở thành xu hướng tất yếu,đồng thời phù hợp với xu hướng thời đại kỹ thuật số.
1.3 Những hạng mục chính
- Có nhiều dạng cấu trúc và phương pháp phân loại động cơ bước,chúng thường được chia thành ba loại theo phương pháp kích thích:loại từ trở ,loại nam châm vĩnh cửu và loại nam châm hỗn hợp,theo số lượng pha ,chúng có thể được chia thành một loại,dạng pha,hai pha,bap ha và nhiều pha.
- Trong số các động cơ bước được sử dụng ở nước ta,động cơ bước phản kháng là loại chính .Hiệu suất vận hành của động cơ bước có liên quan chặt chẽ đến phương pháp điều khiển ,từ góc độ phương pháp điều khiển ,hệ thống điều khiển động cơ bước có thể đưọc chia thành ba loại sau:hệ thống điều khiển phòng hở ,hệ thống điều khiển vòng kín và bán vòng .Hệ thống điều khiển vòng kín ,hệ thống điều khiển nửa kín thường được phân loại thành hệ thống vòng hở hoặc vòng kín trong các ứng dụng thực tế.
1.4 Cấu trúc chính
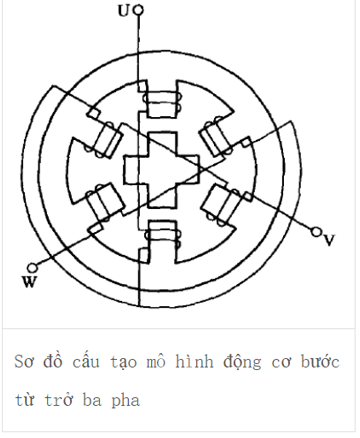
- Sơ đồ cấu tạo của mô hình động cơ bước từ trở ba pha được thể hiện ở sơ đồ tổng quan .Stator và roto của nó.Các lõi được làm bằng tấm thép silicon.Có sáu cực từ trên stato,mỗi cực có 2 cực từu đối diện được quốn cùng 1 pha và cuộn 3 pha được nối theo hình ngôi sao giống nhưu cuộn dây điều khiển ,chỉ có cuộn dây trên lõi roto không có cuộn dây,4 răng và chiều rộng răng bằng chiều rộng của guốc cực stato.
1.4.1 Công nghệ điều khiển quá trình tăng giảm tốc động cơ bước.
- Do ứng dụng rộng rãi của động cơ bước nên ngày càng có nhiều nghiên cứu về điều khiển động cơ bước nếu xung bước thay đổi quá nhanh trong quá trình khởi động hoặc tăng tốc thì roto sẽ không thể theo kịp sự thay đổi của tín hiệu công suất,quán tính gây tắc nghẽn .Khi dừng hoặc giảm tốc ,có thể gây ra hiện tượng vượt tốc cũng vì lý do tương tự.Để tránh hiện tượng chết máy,lệch bước ,nhảy quá bước và tăng tần số hoạt động ,động cơ bước phải điều khiển để tăng hoặc giảm tốc độ.
- Tốc độ của động cơ tùy thuộc vào tần số xung,số răng roto và số nhịp .Vận tốc góc của nó tỉ lệ thuận với tần số xung và được đồng bộ hóa theo thời gian với xung .Do đó ,khi số lượng răng roto và số nhịp vận hành nhất định thì có thể đạt được tốc độ yêu cầu bằng cách điều khiển tần số xung .Vì động cơ bước được khởi động vưới sự trợ giúp của mô-men xoắn đồng bộ nên tần số khởi động không cao để tránh lệch bước.Đặc biệt khi công suất tăng,đưuòng kính rôto tăng quán tính tăng tần số khởi động và tần số vận hành tôi đa có thể chênh lệch đến 10 lần.
- Đặc tính tần số khởi động của động cơ bước có nghĩa là động cơ không thể trực tiếp đạt đến tần số hoạt động khi khởi động mà phải có quá trình khởi động ,tức là tăng dần tốc độ từ tốc độ thấp lên tốc độ vận hành .Khi dừng ,tần số hoạt động không thể giảm về 0 ngay lập tức mà phải có quá tình giảm tốc độ cao và giảm dần về 0.
- Mô-men xoắn đầu ra của đông cơ bước giảm khi tần số xung tăng .Tân số khởi động càng cao,mô-men xoắn khởi động càng nhỏ và khả năng điều khiển tải càng kém .Nó gay ra hiện tượng lệch nhịp khi khởi động và sẽ vượt quá giới hạn ,xảy ra khi dừng lại.Để động cơ bước nhanh chóng ddattj tốc độ yêu cầu mà không bị hụt bước hoặc vọt lố,điều quan trọng là tận dụng tối đa mô-men do động cơ bước cung cấp ở mỗi tần số hoạt động trong quá tình tăng tốc ,đồng thời tận dụng tối đa mô-men xoắn ,cần thiết để tăng tốc ,phản ứng nhanh,thời gian chạy từ điểm đầu đến điểm cuối yêu cầu phải ngắn nhất,đòi hỏi quá trình tăng giảm tốc ngắn nhất và tốc độ cao nhất ở tốc độ không đổi .
- Các nhà khoa học và công nghệ trong và ngoài nước đã thực hiện nhiều nghiên cứu về công nghệ điều khiển tốc độc của động cơ bước,thiết lập nhiều mô hình toán học điều khiển tăng tốc và giảm tốc ,nhưu mô hình hàm mũ,mô hình tuyến tính ,vv…đôngf thời thiết kế và phát triển 1 sự đa dạng của mạch điều khiển trên cơ sở này ,cải thiện các đặc tính chuyển động của động cơ và thúc đẩy phạm vi ứng dụng của động cơ bước.Việc tăng tốc và giảm tốc theo cấp số nhân có tính đến các đặc tính tần số mô-men xoắn vốn có của động cơ bước,không chỉ đảm bảo rằng động cơ bước không chỉ bị mất bước trong quá trình chuyển động mà còn phát huy hết khả năng của động cơ.Các đặc tính vốn có giúp rút ngắn thời gian tăng tốc và giảm tốc nhưng khó đạt được do sự thay đổi của tải động cơ,việc tăng tốc và giảm tốc chỉ xét đến mối quan hệ tốc độ góc của động cơ trong dải công suất tải tỉ lệ thuận với xung ,không phụ thuộc vào sự dao động của điện áp nguồn và môi trường tải.Phương pháp tăng tốc này là không đổi .Nhược điểm là các đặc tính của mô-men đầu ra của động cơ bước thay đổi theo tốc độ không được xem xet đầy đủ và động cơ sẽ mất đồng bộ ở tốc độ cao.
1.4.2 Phân khu điều khiển động cơ bước
- Động cơ bước bị giới hạn bởi quy trình sản xuất của chính nó.Ví dụ ,kích thước của góc bước được xác định bởi số răng roto và số nhịp chạy.Tuy nhiên ,số lượng răng roto và số nhịp chạy bị hạn chế,do đó,góc bước của động cơ bước thường lớn hơn và cố định,độ phân giải bước thấp ,thiếu tính linh hoạt,rung khi chạy ở tần số thấp và ồn hơn các động cơ vi mô khác ,khiến thiết bị vật lý dễ bị mỏi hoặc hư hỏng.Những thiếu sót này cho phép sử dụng động cơ bước trong 1 số trường hợp có yêu cầu thấp hơn.Đối vưới các trường hợp có yêu cầu cao hơn,chỉ cố thể áp dụng điều khiển vòng kín ,điều này làm tăng độ phức tạp của hệ thống ,hệ thống điều khiển vòng hở tuyệt vời .Sử dụng hiệu quả các thành phần điều khiển .Công nghệ lái xe phân khúc khắc phục hiệu quả những nhược điểm này ở mức độ ổn định.
- Công nghệ truyền động phân chia động cơ bước là công nghệ truyền động được phát triển vào giữa những năm 1990,có thể cái thiện đáng kể hiệu suất toàn diện của động cơ bước.Năm 2008,1 học giả người Mỹ lần đầu tiên đề xuất phương pháp điều khiển phân chia góc bước tại Hội Nghị thường niên về Thiết bị và Hệ thống Điều khiển Chuyển động Tăng dần của Mỹ .Trong 20 năm tiếp theo,bộ truyền động phân chia động cơ bước đã phát triển vượt bậc.Nó dần dần phát triển và trưởn thành hoàn toàn vaò những năm 1990.Nghiên cứu của nước ta về công nghệ truyền động phân khucsbatws đầu cùng thời điểm với nước ngoài.
- Nó đạt được sự phát triển vào giữa những năm 1990.Chủ yếu được sử dụng trong các lĩnh vực công nghiệp ,hàng không vũ trụ ,robot,đo lường chính xác ,vv..chẳng hạn nhưu máy kinh vĩ quang điện để theo dõi vệ tinh,dụng cụ quân sự ,thông tin liên lạc và thiết bị radar,vv..Việc ứng dụng rộng rãi công nghệ truyền động phân khu làm cho số pha của động cơ không bị giới hạn bởi góc bước ,bộ truyền động dòng không đổi chopper,bộ điều chế độ rộng xung của thiết bị và điều khiển truyền động xoay đồng đều biên độ không đổi vecto hiện tại được sử dụng ,giúp cải thiện đáng kể đô chính xác hoạt động của động cơ bước và làm cho động cơ bước trong các lĩnh vực ứng dụng năng lượng thấp đang phát triển theo hướng tốc độ và độ chính xác cao .
1.5 Chiến lược kiểm soát
1.5.1 Điều khiển PID
- Là 1 phương pháp điều khiển đơn giản và thực tế ,điều khiển PID đã được sử dụng rộng rãi trong các bộ truyền động động cơ bước .Nó hình thành độ lệch điều khiển e(t) dựa trên giá trị r(t)đã cho và giá trị đầu ra thực tế c(t),đồng thời sử dụng tỉ lệ ,tích phân của độ lệch để tạo thành đại lượng kiểm soát thông qua tổ hợp tuyến tính để kiểm soát đối tượng bị điều khiển .Tài liệu sử dụng cảm biến vị trí tích hợp tỏng động cơ bước lai hai pha .Dựa trên bộ phát tín hiệu vị trí và điều khiển vecto,bộ điều khiển tốc độ Pi có thể điều chỉnh tự động được thiết kế .Bộ điều khiển này có thể điều chỉnh tốc độ trong các điều kiện làm việc thay đổi .Dựa trên mô hình toán học của động cơ bước ,tài liệu thiết kế hệ thống điều khiển PID cho động cơ bước và sử dụng cho thuật toán điều khiển PID để thu được đại lượng điều khiển ,từ đó điều khiển động cwo di chuyển đến vị trí xác định .Cuối cung,mô phỏng đã xác minh rằng bộ điều khiển có đặc tính ứng động tốt.Việc sử dụng bộ điều khiển PID có uư điểm là cấu trúc đơn giản ,độ bền cao và độ tin cậy cao nhưng không thể xử lý hiệu quả các thông tin không chắc chắn trong hệ thống.
- Hiện nay,điều khiển PID thường được kết hợp với các chiến lược điều khiển khác để tạo thành 1 loại điều khiển tổng hợp mới có trí tuệ .Loại điều khiển phức hợp thông minh có khả năng tự học ,tựu thích ứng ,tự tổ chức ,đồng thời có thể tự động xác định các tham số quy trình được kiểm soát và tự động điều chỉnh chúng .Các tham số điều khiển thích ứng với sự thay đổi của các tham số quá trình được điều khiển ,đồng thời có các đặc tính của bộ điều khiển PID thông thường.
1.5.2 Kiểm soát thích nghi
- Điều khiển thích ứng là 1 nhánh của lĩnh vực điều khiển tự động được phát triển vào những năm 1950.Nó được sản xuất để có được bộ điều khiển hiệu suất cao khi các đối tượng điều khiển trở nên phức tạp hơn và khi các đặc tính động không xác định hoặc thay đổi không thể đoán trước.Ưu điểm chính của nó là thực hiện dễ dàng và tốc độ thích ứng nhanh.Nó có thể khắc phục hiệu quả ảnh hưởng do thay đổi chậm trong các thông số mô hình động cơ và là tín hiệu thâm chiếu theo dõi tín hiệu đầu ra .Các nhà nghiên cứu đã đưu ra các thuật toán điều khiển thích ứng ổn đinh toàn cầu dựa trên các mô hình tuyến tính hoặc gần đúng của động cơ bước ,Các thuật toán điều khiển này phụ thuộc rất nhiều vào các thông số mô hình động cơ .Tài liệu kết hợp điều khiển phản hồi vòng kín với điều khiển thích ứng để phát hiện vị trí và tốc độ của roto thông qua phản hồi và xử lý thích ứng ,chuỗi xung dẫn động được tự động phát ra theo đường cong vận hành nâng được tối ưu hóa giúp cải thiện đặc tính mô men kéo của động cơ .Đồng thười điều này cho phép động cơ đạt được khả năng điều khiển vị trí chính xác hơn và tốc độ cao hơn và mượt mà hơn.
- Hiện nay,nhiều độc giả kết hợp điều khiển thích ứng vưới các phương pháp điều khiển khác để giải quyết những hạn chế của điều khiển thích ứng đơn giản.Bộ điều khiển servo tốc độ thấp thích ưng mạnh mẽ được thiết kế trong tài liệu đảm bảo bù tối đa mô-men quay và hiệu suất điều khiển theo dõi tôc độ thấp và độ chính xác cao của hệ thống servo.Bộ điều khiển PID mờ thích ứng được triển khai trong tài liệu có thể điều chỉnh trực tuyến các tham số PD thông qua suy luận mờ dựa trên sự thay đổi sai số đầu vào và tôc độ thay đổi lỗi để đạt được điều khiển thích ứng động cơ bước ,từ đó cải thiện hiệu quả thời gian đáp ứng và độ chính xác tính toán của hệ thống và khả năng miễn nhiễm với nhiễu
1.5.3 Điều khiển vector
- Điều khiển véc tơ là cơ sở lý thuyết để điều khiển hiệu suất cao của động cơ điện hiện tại và có thể cải thiện hiệu suất điều khiển mô-men xoắn của động cơ .Nó chia dòng điện stato thành các thành phần kích thích và thành phần mô-men xoắn thông qua định hướng từ trường và điều khiển chúng tương ứng để có được đặc tính tách rời tốt.Do đó ,điều khiển vecto cần điều khiển cả biên độ của dòng điện stato và pha của dòng điện .Do động cơ bước không chỉ có mô-menđiện từ chính mà còn có mô-men từ trở được tạo ra bởi cấu trúc 2 mặt lồi và cấu trúc từ trường bên trong phức tạp nên tính phi tuyến nghiêm trọng hơn nhiều so với động cơ thông thường,do đó điều khiển vecto của nó cũng là phức tạp hơn .Mô hình toán học trục dq của động cơ bước lai 2 pha được rút ra .Liên kết từ thông nam châm vĩnh cửu roto được sử dụng làm hệ tọa độ định hướng .Dòng điện trục trực tiếp id=0 và moomen điện từ của động cơ tỉ lệ với iq .Kiểm soát vecto được thực hiện bằng hệ thống PC.Trong hệ thống ,các cảm biến đượ sử dụng để phát hiện dòng điện cuộn dây động cơ .Bài này suy luận mô hình động cơ bước hybrid 2 pha dựa trên mạng từ và đưa ra cấu trúc của hệ thống servo điều khiển vector của nó.Mô hình nơ ron được sử dụng để tham khảo chiến lược điều khiển thích ứng nhằm bù đắp các yếu tố bất định trong hệ thống trong thực tế.Thông qua điều khiển vecto mô-men xoắn/dòng điện tối đa cho phép điều khiển động cơ hiệu quả.
1.5.4 Ưng dụng điều khiển thông minh
- Điều khiển thông minh không dựa hoặc không hoàn toàn dựa vào mô hình toán học của đối tượng điều khiển.Nó chỉ điều khiển theo tác dụng thực tế.Nó có khả năng xem xét tính không chắc chắn và chính xác của hệ thống trong điều khiển ,phá vỡ điều khiển truyền thóng ,khuân khổ phải dwuaj trên các mô hình toán học.Hiện nay,ứng dụng điều khiển thông minh hoàn thiện hơn trong hệ thống động cơ bước là sự tích hợp điều khiển logic mờ,mạng lưới thần kinh và điều khiển thông minh
1.5.5 Kiểm soát mờ
- Điều khiển mờ là phương pháp thực hiện hóa điều khiển hệ thống dựa trên mô hình mờ của đối tượng được điều khiển ,sử dụng lập luận gần đúng của bộ điều khiển mờ và các phương tiện khác.Là phương pháp điều khiển mô phỏng trực tiếp kết quả suy nghĩ của con người ,điều khiển mờ đã được sử dụng rộng rãi trong lĩnh vực điều khiển công nghiệp.So với điều khiển thông thường,điều khiển mờ không yêu cầu mô hình toán học chính xác và có độ bền và khả năng thích ứng cao nên phù hợp để điều khiển các hệ thống phi tuyến ,thay đổi theo thời gian và có độ trễ theo thời gian.Đưa ra điều khiển mờ trong động cơ bước hỗn hợp 2 pha .Ví dụ ứng dụng trong điều khiển tốc độ .Hệ thống điều khiển góc tiên tiến ,thiết kế không yêu cầu điều khiển mô hình toán học và thời gian đáp ứng tốc độ ngắn .
1.5.6 Điều khiển mạng lưới thần kinh
- Mạng nơ-rong là phương pháp sử dụng số lượng lớn nơ-ron để điều chỉnh theo 1 cấu trúc tôpô và học cách nhất định.Nó có thể đúng hoàn toàn bất kỳ hệ thống phi tuyến phức tạp nào,có thể học và thích ứng với các hệ thống chưa biết hoặc không chắc chắn,đồng thời có độ bền và khả năng chịu lỗi cao ,vì vậy nó đã được sử dụng rộng rãi trong các hệ thống động cơ bước.Mạng nơ-ron được sử dụng để nhận ra dong fphaan chia tối ưu của động cơ bước ,thuật toán chính quy Bayes được sử dụng trong quá trình học và công nghệ điều chỉnh trọng số được sử dụng để tránh mạng nơ-ron chuyển tiếp nhiều lớp rơi vào cục bộ điểm tối thiểu giải quyết hiệu quả bài toán chia góc bằng nhau.
Cảm ơn các bạn đã đọc bài viết.
1.6 Dưới đây là quảng cáo về dịch vụ sửa chữa máy CNC của Công ty ECN:
*Dịch vụ sửa chữa bao gồm:
- Sửa chữa máy tiện CNC
- Sửa chữa máy phay CNC
- Sửa chữa máy khoan CNC
- Sửa chữa máy cắt dây CNC
- Sửa chữa máy gia công trung tâm CNC
- Sửa chữa các loại lỗi câu lệnh máy CNC
*Phụ kiện và linh kiện sửa chữa:
- Bơm dầu, trục chính, trục vít me, dao cụ
- Driver Servo, mạch điều khiển máy CNC (Fanuc, Siemens, Okuma)
- Sửa chữa Amplifier và Spindle Amplifier Module
- Thay thế các linh kiện bị hỏng: màn hình LCD, bàn phím, board mạch
*Ưu điểm khi chọn ECN:
- Đội ngũ kỹ thuật viên giàu kinh nghiệm
- Dịch vụ nhanh chóng, hiệu quả
- Cam kết chất lượng và độ tin cậy
Báo giá sửa chữa máy CNC mới nhất 2021 - ECN (cncecn.vn)
Để được hỗ trợ và báo giá nhanh nhất ,Cam kết dịch vụ sửa chữa tại ECN.
✅ Dịch vụ | ⭐ Uy tín – Chuyên nghiệp |
✅ Giá cả | ⭐ Hợp lý – Tiết kiệm nhất cho khách hàng |
✅ Hỗ trợ | ⭐ Tận nơi – Nhanh chóng 24/7 |
✅ Kỹ thuật sửa chữa | ⭐ Tay nghề cao lâu năm kinh nghiệm |
✅ Bảo hành | ⭐ 3 tháng cho lỗi sửa chữa |
Nhân viên sẽ đến tận nơi kiểm tra, khảo sát sửa máy CNC tại các tỉnh miền bắc như: Hà Nội, Hưng Yên, Bắc Ninh, Phú Thọ, Quảng Ninh, Hà Nam, Nam Định, Thái Nguyên, Hải Dương, Hải Phòng, Bắc Giang, Vĩnh Phúc, Ninh Bình…..
- Dịch vụ sửa chữa nhanh chóng và chuyên nghiệp.
- Có hệ thống thiết bị máy móc sửa chữa tiến tiến hiện đại nhất để phục vụ cho công việc sửa chữa.
- Chi phí sửa chữa hợp lý tốt nhất thị trường.
- Linh kiện sửa chữa luôn có sẵn, linh kiện thay thế chính hãng hoàn toàn mới 100%.
- Tiến hành bàn giao lắp đặt tại nhà máy, hỗ trợ kỹ thuật nếu cần.
- Dịch vụ bảo hành sau sửa chữa lâu dài.
Còn chần chừ gì nữa ,Liên hệ ngay với chúng tôi để được tư vấn miễn phí.
Kỹ thuật: Mr Mạnh 0989.866.423
gmail: kd1.ecn.vn@gmail.com
Website : http://ecncnc.com/
Fanpage: https://www.facebook.com/CTYECN/
Địa chỉ: 37 Đường Lương Văn Can – Liên Bảo – Vĩnh Yên – Vĩnh Phúc
1 Nếu bạn đang có nhu cầu sửa chữa máy CNC,thì không thể bỏ qua Công Ty TNHH Điện Tử Công Nghiệp ECN ,nơi sửa chữa CNC uy tín và chất lượng nhất Miền Bắc.
Công Ty TNHH Điện Tử Công Nghiệp ECN được thành lập vào đầu năm 2016 bởi ông Đỗ Văn Mạnh,một k ỹ sư tự động hóa hàng đầu trong lĩnh vực biến tần và điều khiển tự động .Từ những bước khởi đầu khi chỉ hoạt động với một số nhân viên nhỏ,giờ đây ECN đã trở thành công ty phát triển và là công ty top đầu trong lĩnh vực công nghiệp CNC tại Miền Bắc.
ECN là đơn vị uy tín chuyên sửa chữa phần cứng máy CNC .Với độ ngũ kỹ thuật viên giàu kinh nghiệm ,ECN đã thực hiện nhiều dự án sửa chữa thành công trên các loại máy CNC từ các hãng nổi tiếng như Fanuc,Mitsubishi,Mazak,Yasnac,Siemens,Fagor,Hitachi Seiki,…và nhiều hãng khác .
Công Ty TNHH Điện Tử Công Nghiệp ECN –Kinh nghiệm 10+ Năm sửa chữa máy CNC tại Việt Nam-Sửa được tất cả mọI lỗi ở máy CNC –Sửa nhanh,hiệu quả-Bảo hành lâu dài-Giá cả hợp lý rẻ hơn thị trường 25%-Đội ngũ kỹ thuật hùng hậu –Hỗ trợ kỹ thuật 24/7-Trang thiết bị sửa chữa tân tiến hiện đại nhất Việt Nam.
Đỗ Văn Mạnh:Người sáng lập ra Công Ty TNHH Điện Tử Công Nghiệp ECN.
1.1 Trong bài viết này chúng tôi sẽ nói về động cơ step.Vậy động cơ step là gì ?
Bài viết này đã được xem xét bởi dự án biên soạn và ứng dụng bách khoa toàn thư khoa học “Phổ biến khao học ở Trung Quốc”.
Động cơ bước là động cơ chuyển đổi tín hiệu xung điện thành chuyển vị góc hoặc chuyển vị tuyến tính tương ứng.Mỗi khi tín hiệu xung được đưa vào ,roto sẽ quay một góc hoặc di chuyển về phía trước một bước .Độ dịch chuyển góc hoặc độ dịch chuyển tuyến tính đầu ra tỉ lệ thuận với số xung đầu vào và tốc độ quay tie lệ thuận với tần số xung.Vì vậy ,động cơ bước còn được gọi là động cơ xung.(1 loại động cơ cảm ứng.Theo nguyên lý điện tử ,điện năng được chuyển hóa thành cơ năng).
MỤC LỤC
1.1 Trong bài viết này chúng tôi sẽ nói về động cơ step.Vậy động cơ step là gì ?. 3
1.2.1 Tổng quan về công nghệ điều khiển động cơ bước và phát triển. 4
1.4.1 Công nghệ điều khiển quá trình tăng giảm tốc động cơ bước. 6
1.4.2 Phân khu điều khiển động cơ bước. 7
1.5.4 Ưng dụng điều khiển thông minh. 10
1.5.6 Điều khiển mạng lưới thần kinh. 11
1.6 Dưới đây là quảng cáo về dịch vụ sửa chữa máy CNC của Công ty ECN: 11
Để được hỗ trợ và báo giá nhanh nhất ,Cam kết dịch vụ sửa chữa tại ECN. 12
1.2 Giới thiệu
- Động cơ bước hay còn gọi là động cơ xung,hoạt động dựa trên nguyên lý cơ bản nhất của nam châm điện.Nguyên ý hoạt động của nó dựa trên sự thay đổi độ dẫn từ của khe hở không khí để tạo ra mô-men xoắn điện từu.Mô hình ban đầu có nguồn gốc từ năm 1830 đến 1860.Những nỗ lực nhằm mục đích kiểm soát bắt đầu vào khoảng năm 1870 và đưuọc áp dụng vào cơ chế vận chuyển điện cực của đèn hồ quang Hydro.Đây được coi là động cơ bước nguyên bản .Năm 1923,James Wỉ French đã phát minh ra máy biến từ trở bap ha (Variable Reluctance),tiền thân của động cơ bước.Vào đầu thế kỷ 20,động cơ bước được sử dụng rộng rãi trong các tổng đài điện thoại tự động .Khi các cường quốc tư bản phương Tây tranh giành thuộc địa ,động cơ bước được sử dụng rộng rãi trong các hệ thống độc lập như tàu thủy và máy bay thiếu nguồn điện xoay chiều.Việc phát minh ra bóng bán dẫn vào cuối năm 1950 dần dần được áp dụng vào động cơ bước,giúp việc điều khiển kỹ thuậy số trở nên dễ dàng hơn.Sau những năm 1980,do sự xuất hiện của các loại vi tính giá rẻ có nhiều chức năng nên các phương pháp điều khiển động cơ bước trở nên linh hoạt va đa dạng hơn.
- Sự khác biệt lớn nhất giữa động cơ bước và các động cơ điều khiển khác là nó nhận điều khiển kỹ thuật số(tín hiệu hiệu xung điện)và chuyển đổi chúng thành chuyển vị góc hoặc chuyển vị tuyên tính tương ứng.Bản thân nó là một bộ chuyển động hoàn thành việc chuyển đổi chế độ kỹ thuật số.Hơn nữa ,nó có thể sử dụng để điều khiển vị trí vòng hở và có thể đạt được mức tăng vị trí xác định bằng cách nhập tín hiệu xung.So với hệ thống điều khiển DC truyền thống,chi phí của cái gọi là hệ thống điều khiển vị trí gia tăng này giảm đáng kể ,và hầu như không cần điều chỉnh hệ thống .Độ dịch chuyển góc của động cơ bước tỉ lệ thuận với số lượng xung đầu vào và được đồng bộ hóa với các xung theo thời gian .Do đó,miễn là số lượng ,tần số và trình tự pha của cuộn dây động cơ được kiểm soát thì có thể đạt được góc,tốc độ và hướng cần thiết.
- Động cơ bước của Trung Quốc bắt đầu vào những năm 1970 đến giữa năm 1980 là giai đoạn phát triển của các sản phẩm hoàn chỉnh.Cấc loại động cơ mới và động cơ hiệu suất cao liên tục được phát triển .Sự phát triển của vật liệu nam châm vĩnh cửu,công nghệ bán dẫn và công nghệ máy tính đã làm cho động cơ bước được sử dụng rộng rãi trong nhiều lĩnh vực.
1.2.1 Tổng quan về công nghệ điều khiển động cơ bước và phát triển.
- Là một động cơ đặc biệt để điều khiển ,động cơ bước không thể kết nối trực tiếp với nguồn điện DC hoặc AC để hoạt động mà phải sử dụng nguồn điện chuyên dụng (trình điều khiển động cơ bước).Trước sự phát triển của công nghệ vi điện tử ,đặc biệt là công nghệ máy tính,bộ điều khiển (bộ tạo tín hiệu xung)đưuọc thực hiện hoàn toàn bằng phần cứng và hệ thống điều khiển sử dụng các thành phần riêng biệt hoặc mạch tích hợp để tạo thành một vòng điều khiển ,cũng tiêu tốn một lượng lớn linh kiện .Sau khi hoàn thiện,nếu muốn thay đổi sơ đồ điều khiển thì phải thiết kế lại mạch điện.Điều này đồi hỏi phải phát triển các trình điều khiển khác nhau cho các độngc wo khác nhau .Độ khó phát tiển và chi phí phát triển rất cao và việc điều khiển khó khan ,điều này hạn chế việc phát triển động cơ bước.
- Vì động cơ bước là thiết bị chuyển đổi các xung điện thành các chuyển động cơ học rời rạc và có đặc tính kiểm soát dữ liệu tốt nên máy tính đã trở thành nguồn truyền động ý tưởng cho động cơ bước.Với sự phát triển của vi điện tử và công nghệ máy tính ,phần mềm ,phần cứng ,trở thành dòng chính ,tức là xung điều khiển được tạo ra thông qua chương trình để điều khiển mạch phần cứng .Bộ vi điều khiển điều khiển động cơ bước thông qua phần mềm ,khai thác tốt tiềm năng của động cơ .Vì vậy,việc sử dụng máy vi tính đơn chip để điều khiển động cơ đã trở thành xu hướng tất yếu,đồng thời phù hợp với xu hướng thời đại kỹ thuật số.
1.3 Những hạng mục chính
- Có nhiều dạng cấu trúc và phương pháp phân loại động cơ bước,chúng thường được chia thành ba loại theo phương pháp kích thích:loại từ trở ,loại nam châm vĩnh cửu và loại nam châm hỗn hợp,theo số lượng pha ,chúng có thể được chia thành một loại,dạng pha,hai pha,bap ha và nhiều pha.
- Trong số các động cơ bước được sử dụng ở nước ta,động cơ bước phản kháng là loại chính .Hiệu suất vận hành của động cơ bước có liên quan chặt chẽ đến phương pháp điều khiển ,từ góc độ phương pháp điều khiển ,hệ thống điều khiển động cơ bước có thể đưọc chia thành ba loại sau:hệ thống điều khiển phòng hở ,hệ thống điều khiển vòng kín và bán vòng .Hệ thống điều khiển vòng kín ,hệ thống điều khiển nửa kín thường được phân loại thành hệ thống vòng hở hoặc vòng kín trong các ứng dụng thực tế.
1.4 Cấu trúc chính
- Sơ đồ cấu tạo của mô hình động cơ bước từ trở ba pha được thể hiện ở sơ đồ tổng quan .Stator và roto của nó.Các lõi được làm bằng tấm thép silicon.Có sáu cực từ trên


